Forum Replies Created
-
AuthorPosts
-
uRADMonitor
KeymasterGreat to see this working! You can use http://uradmonitor.com/?open=8200009C or the new beta dashboard https://uradmonitor.com/tools/dashboard-04/?open=8200009C
KeymasterSwitching the autocalibration off and automatic calibration every month at a quit moment ?
That’s a very good idea!
KeymasterI’ve provided more details on email, please check it. But for the continuity of the topic, the bug becomes apparent when you decode the “converted” values. Please add the decoding function:
double int2double(uint16_t val) { int8_t d = (val >> 8) & 0xFF; int8_t i = (val & 0xFF) - 127; if (i < 0) d *= -1; return i + d / 100.0; }The if (i < 0) d *= -1; won't trigger when i is 0. The problem with this algorithm is that we have no way of knowing the sign, when the integer byte is 0. Exactly the bug you have spotted. Try this code to the "converted" values, and check the more details I sent on your email. I tried to see if this is fixable on the server side, but apparently information is lost on the conversion. A new encoding scheme has been added to the firmware. We will need to install this new firmware on all affected units.
KeymasterThanks to your findings, I was able to identify a bug in the temperature encoding scheme:
uint16_t double2int(double val) { int8_t sintp = (int8_t)val; //signed integer part int8_t sdecp = (val - sintp ) * 100; //signed decimal part uint8_t udecp = sdecp>0?sdecp:-1*sdecp; //removed decimal sign uint8_t uintp = sintp + 127; //convert to unsigned uint16_t res = (udecp << 8) | (uint16_t)uintp; //pack it together return res; }The sign is lost when the integer part is 0, exactly all values between 0 and -1. The fix is added to the firmware as we speak, unless it can be solved on the server side.
For CO2, let’s continue herE: https://www.uradmonitor.com/topic/co2-sensor/
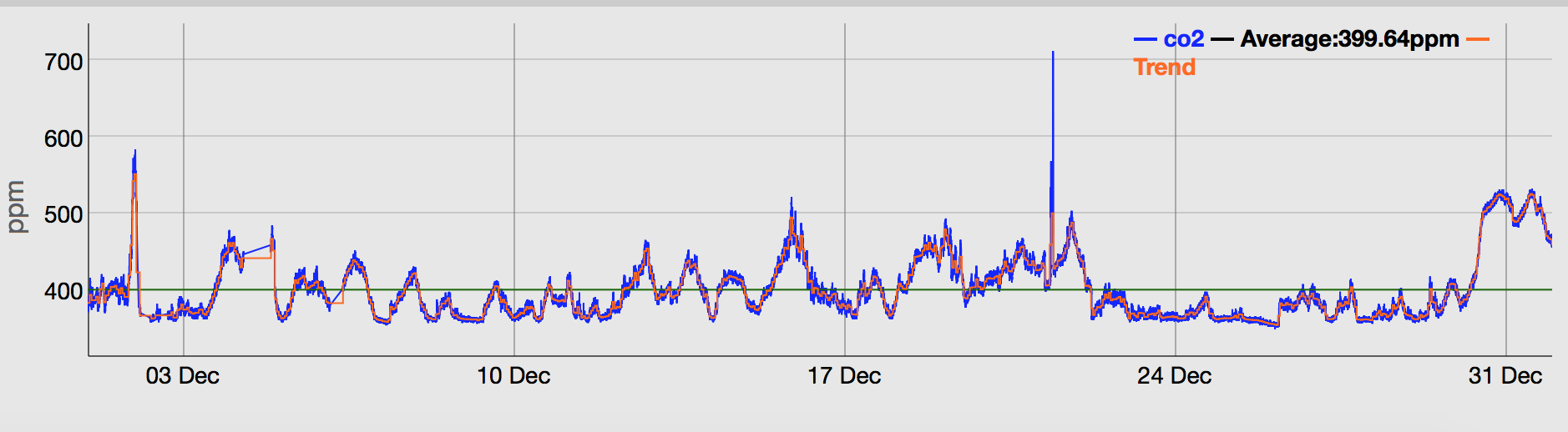
KeymasterThe readings across December. I was able to identify a single “jump”. Please confirm. We can have the auto-calibration disabled, but I don’t think it’s a good idea. All tests on these sensors have shown good correspondence to the reference unit. I’m concerned that disabling auto-calibration will induce a building offset over time.
Attachments:
KeymasterThe PM2.5 data is originally generated by the A3, which is then used to extrapolate the PM1.0 / PM10.0 via a linear model, which you probably saw already due to the common chart shapes. There’s a lot of literature covering this topic, and more transformation models. So we might see changes to these calculations in the future.
KeymasterDone! Happy New year!
KeymasterSounds good, let me know when you get the usbAsp , I will assist you further.
KeymasterYour unit doesn’t have a noise sensor as I recall. This feature is being added to current A3 design, but it is still experimental.
For the CH2O, please try to approach some ethyl alcohol close to the unit, so some of the vapour would be sucked inside the detector, to see if it triggers a response.
KeymasterDone! Thanks, Radu
KeymasterSure, please use:
http://www.uradmonitor.com/tools/dashboard-04/?open=11000084respectively,
http://www.uradmonitor.com/tools/dashboard-04/?open=82000074Please note this is in BETA.
Happy New Year!
KeymasterSolved, the LoRaWAN callback is not configured: https://uradmonitor.com/tools/dashboard-04/?open=14000011
KeymasterWould you like to upgrade the firmware? This will probably improve things. It’s easy: https://www.uradmonitor.com/firmware-upgrade-guide/
KeymasterHi Pat, newer iterations have a sound/noise sensor, but it is still in testing, so I would call it experimental. Your unit is HW103 and doesn’t have it, this is why you are seeing zeros.
KeymasterNeither do I , if port 80 is open this shows the firmware is working (the TCP/IP stack is fairly complex by itself).
-
AuthorPosts